Canonical Execution Model
Distributed execution is not a sequence of positions. It is a sequence of causal steps across time.
A workload does not exist because it is next in a list. It exists because it was provisioned at a specific moment, in response to a specific event, as a continuation of a specific execution chain.
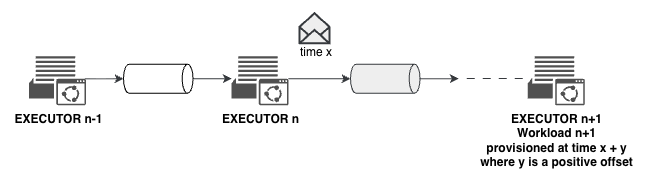
When Workload n receives a message at time x, Workload n+1 is provisioned at time x + y, where y is a positive offset. The gap is real. The downstream executor does not exist yet when the upstream executor acts.
This has three consequences:
- Authority flows from origin — never re-created: there is no moment where a new workload can bootstrap its own authority. Authority must arrive causally from what came before.
- Every hop must prove continuity, not possession: holding a token is not enough. The workload must demonstrate it is a valid continuation of the execution chain.
- Execution is temporal and causal, not positional: the chain is defined by what happened and when — not by topology or configuration.
This is why possession-based models fail in distributed execution. They assume the chain is synchronous and positional. It is not.
Authority Continuity
PIC defines three invariants that must hold at every execution hop:
- Provenance: the causal chain is always traceable from origin to current state, unbroken.
- Identity: the origin principal
p₀is immutable throughout the chain. - Continuity: authority can only decrease at each hop. It never expands.
Under these invariants, authority cannot be re-created mid-chain, cannot escape its origin, and cannot expand across any dimension. The confused deputy problem becomes structurally inexpressible — not mitigated, but impossible by construction.